Inverse und direkte Kinematik – Robotik für die linke Hand – Teil 4
Probleme bei der direkten Kinematik
Die kognitive Last
Es gibt einen erstaunlichen Sachverhalt. In meinen Screenvideos und durch meine Erklärungen muss es eigentlich so wirken, dann rotieren wir nur die Gelenke und alles ist in Butter.
In Blender dauert es ab und zu, bis der Rechner bei der inversen Kinematik reagiert. Denn er muss berechnen, wie die hintere Kette reagiert. Je nach Situation kann dies ein paar Sekunden dauern. Bei der direkten Kinematik rotiere ich das entsprechende Glied und kann den Rechner einfach nicht überfordern, weil die hintere Kette verändert sich nicht und muss nicht berechnet werden. Das Ergebnis für die vordere Kette ist eindeutig und braucht keine Rechenpower.
Bei Menschen passiert etwas anderes.
Das mache ich ab und zu mit meinen Schülern. Ich führe dann ein Spiel namens “Gitarrenroboter” ein. Die Grundlogik verstehen sie sofort. Aber, wenn sie dann sagen müssen, was für ein Gelenk sie öffnen oder schließen müssen, dann läuft so mancher Kopf rot an und jedes Gesicht wirkt sehr angespannt.
Erwähne ich dann später einmal das Wort “Gitarrenroboter”, wird mir jedes von mir gewünschte Wohlverhalten versprochen.
Vielleicht hat auch schon so mancher versucht, seine Bewegungen im Sinne der direkten Kinematik zu steuern. Es ist schon komisch, so zu denken, oder? Und wenn man versucht zwei Gelenke gleichzeitig so zu steuern, dann muss man sich ganz schön konzentrieren.
Intuitive Geometrie versus realer Geometrie
Meiner Erfahrung nach gibt es eine deutliche Diskrepanz zwischen realen Gliederstellungen bzw. Gelenkwinkel und den angenommenen. Ich möchte dies am Beispiel Fingerspreizen erläutern. Eigentlich denkt wahrscheinlich keine*r darüber nach, wie sich beim Fingerspreizen die Grundglieder verändern? Bitte ich meine Schüler*Innen, dies spontan aufzuzeichnen, dann bekomme ich meist so eineSkizze.
Weise ich darauf hin, dass die Grundglieder ja in Gelenken fixiert sind und die Parallelverschiebung deswegen nicht möglich ist, dann kommt ein Teil der Schüler*Innen darauf, so etwas aufzuzeichnen.
Bitte ich darum, dass die Bewegungsbahn der Endpunkte aufgezeichnet wird, dann sieht es meistens so aus:
Wenige kommen auf die Idee, die Bewegungsbahn als Verbindung einzutragen.
Und niemand ist bisher darauf gekommen, die Bewegungsbahn als Kreisbogen einzutragen.
Die*r Leser*In mache sich einfach den Spaß, einfach ohne Vorstellung die Finger zu spreizen. Dann die Vorstellungen durchzuprobieren.
Achtung, wichtig dabei ist, dass man nicht nur an das zu bewegende Glied denkt, sondern an das Glied dahinter und wahrnimmt, dass diese beide Glieder die zwei Schenkel eines Winkels bilden, der sich verändert.
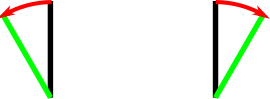
Meine Vorgehensweise ist, dass ich mein Fingergefühl visualisiere und auf die Skizze im Kopf lege. Also in diesem Fall liegt das Grundgelenk am unteren Ende der schwarzen bzw. grünen Linie, das Mittelgelenk am oberen Ende der schwarzen bzw. grünen Linie. Beim Bewegungsvorgang achte ich darauf, dass das Mittelgelenk dem roten Pfeil folgt.
Man wird wahrscheinlich feststellen, dass die Bewegung verschieden schwer- oder leichtgängig wird. Weiter, die Bewegungsvorstellung beeinflusst die Dehnfähigkeit.
Weiter kommt so manchem*r die Erkenntnis, dass die eigene geometrische Vorstellung nicht mit der realen Geometrie übereinstimmt.
Aber das ist nicht der entscheidende Punkt, sondern dass es schwer ist, so zu denken, um seine Bewegung zu steuern. Bzw. es dürfte wahrscheinlich nicht machbar sein, dass man seine intuitiven Bewegungsvorstellungen durch solche Vorstellungen dauerhaft ersetzt.
Also ist es sinnvoll, mit diesen Vorstellungen zu arbeiten? Meiner Erfahrung nach, ja. Wenn es darum geht, dass Arm und Hand ruhig bleiben und sich nur die Finger bewegen, dann arbeite ich gerne mit dieser Vorstellung.
Aber bei allen Bewegungen, die komplexer sind, stellt sich auf den ersten Blick ein Problem. In dem schon zitierten Wikipediaartikel “FK- und IK-Rigging” heißt es zu den Nachteilen der direkten Kinematik:
“In eine FK-Animation muss viel Zeit und Geduld investiert werden. Für jede Pose müssen die Gelenke der kompletten Gelenkkette neu rotiert werden. Die Position eines Abschlussgelenkes ist dadurch schwer zu erreichen.”
Praktisch bedeutet dies auf den ersten Blick, wenn man versucht eine Bewegung im Sinne von Winkeländerungen nachzustellen, wird es auch sehr schnell unübersichtlich. Was wiederum bedeutet, man kann wieder nicht nachvollziehen, wie die Bewegung funktioniert
Aber werfen wir doch einen zweiten Blick auf die Sache.
Der Beitrag wurde am Freitag, den 15. April 2022 um 08:35 Uhr veröffentlicht von Stephan Zitzmann und wurde unter den Kategorien: Gitarre lernen, Gitarrentechnik, Gitarrenunterricht, Übemethodik abgelegt. | Es gibt keinen Kommentar .