Inverse und direkte Kinematik – Robotik für die linke Hand – Teil 1
Ich habe mich mal wieder mit Blender beschäftigt. Eigentlich wollte ich herausfinden, von wie vielen Gliedern der Hand-Schulter-Kette die Stellung eindeutig definiert sein muss, sodass es nur eine Möglichkeit der Stellung der anderen Glieder in dieser Kette gibt.
Dahinter steht die Frage und Erfahrung, warum passiert bei SchülerInnen Haltungs- und Bewegungsausführungen, etwas ganz anderes, als das, was man ihnen “doch” ganz genau, erklärt hat.
Als ich mein Modell, was immer noch nicht fertig ist, in Blender zusammenbaute, musste ich auch die Glieder in die richtige Position schieben.
Dabei lernte ich zwei Steuerungsprinzipien kennen.
- Inverse und
- direkte
Kinematik.
In meinem damaligen Artikel bzgl. Blender beschreibe ich aus heutigem Wissen die direkte Kinematik als Beschreibungs- und Betrachtungsmodus. Bloß beim jetzigen Lesen bemerke ich, wie schlecht begreifbar ist, wo ihr Reiz für das Gitarrenspiel liegt. In der Gegenüberstellung mit der inversen Kinematik wurde meiner Meinung nach der Vorteil der direkten Kinematik als Denk- und Erklärmodell für das Gitarrenspiel deutlich.
Inverse Kinematik
Ich zitiere aus dem Wikipediaartikel zur Inversen Kinematik:
“Die inverse Kinematik, Inverskinematik oder Rückwärtstransformation ist ein Begriff aus der Computeranimation und Robotik. Sie ermöglicht bei einem Roboter die Bestimmung der Gelenkwinkel der Armelemente anhand der Pose (Position und Orientierung) des Endeffektors. Sie spielt damit eine wichtige Rolle bei der Bewegung von Industrierobotern und bei der Computeranimation von Charakteren. Sie ist das logische Gegenstück zur direkten Kinematik.
Bei der inversen Kinematik wird das letzte Glied der kinematischen Kette, der Endeffektor, bewegt und in die gewünschte Lage gebracht. Die übrigen Glieder der Kette müssen dann entsprechend den Freiheitsgraden ihrer Gelenke passende Lagen einnehmen.
Vergleichen lässt sich dies mit dem menschlichen Arm, der mit seinen Gelenken auch eine solche kinematische Kette darstellt: Bringt man beispielsweise die Hand in eine bestimmte Lage, so nehmen Handgelenk, Ellenbogen und Schulter automatisch ebenfalls bestimmte Stellungen ein. Genau diese Gelenkwinkel-Stellungen müssen über die inverse Kinematik bestimmt werden.”
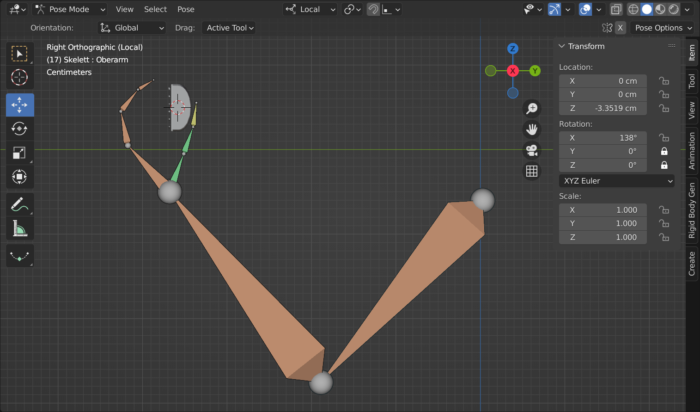
Damit dieses Zitat anschaulicher wird, habe ich ein Screenvideo “gedreht”.
(Die Ähnlichkeiten zu Schüler*Innenverhalten ist meiner Meinung nach nicht zufällig.)
Die Definition und das Video stehen etwas im Gegensatz zu Wirklichkeit des Gitarrenunterrichts und -spiels. Man wirkt nicht nur auf das Endglied ein, sondern auch auf andere Glieder der Gliederkette.
Im Video kann man erkennen, dass Pfeile mein Ziehen an dem Endglied bestimmen. Rein technisch ist es möglich beliebig an einem Glied zur Positionierung zu ziehen. Diese Möglichkeit ist auch in Blender vorgesehen. Aber es ist einfacher mit solchen Vorgaben, die variiert werden können zu arbeiten.
Im weiter wird zur direkten Kinematik ein Unterschied in der Denkungsart klar.
Direkte Kinematik
Auch hier bediene ich mich eines Wikipediaartikels. Nämlich “FK- und IK-Rigging“.
Forward Kinematics,[1] auch direkte Kinematik, ist eine von zwei grundlegenden Methoden, um die Gelenkbewegung eines vollständig geriggten Charakters zu berechnen. Bei der Verwendung von einem Forward-Kinematics-Rig kann eine Gelenkrotation nur Teile des Skeletts betreffen, die in der Verbindungshierarchie darunterliegen.
So beeinflusst z. B. die Drehung der Schulter eines Charakters die Position von Ellbogen, Handgelenk und Hand. Bei der Animation mit Forward Kinematics muss der Animator typischerweise die Rotation jedes Gelenks individuell einstellen, um eine gewünschte Position zu erreichen. Dazu muss der Animator die Gelenkhierarchie vom ersten bis zum letzten Knochen durcharbeiten.
Auch hier wieder ein Screenvideo.
Gemeinsamkeiten
Beiden Methoden ist gemeinsam, wenn ich nur auf ein Glied der Kette einwirke, verändere ich die Position und Stellung im Raum von anderen Gliedern in der Kette.
Eine weitere Gemeinsamkeit ist, dass es immer mehrere Lösungen gibt. Dies betrifft den Weg und das Endergebnis.
Einen Lösungsweg zu erkennen ist nicht leicht, wegen fehlender Offensichtlichkeit.
Unterschiede
Um den ersten Unterschied zu erklären, muss ich auf eine Gemeinsamkeit hinweisen. Bei beiden Kinematiken ist der Ansatzpunkt der Einwirkung gleich. Es handelt sich um den Mittelpunkt des Gelenkes, das in unserem Fall zwei Glieder verbindet.
Bei der inversen Kinematik verschiebt man diesen Punkt im Raum. Bei der direkten Kinematik dient dieser Punkt als Drehpunkt, um den das Glied gedreht wird. Der Punkt als solches bleibt damit stabil im Raum und verändert sich nicht.
Dieser Unterschied, wie sich der Angriffspunkt bei der Veränderung im Raum bewegt, hat den für uns interessanten Unterschied zur Folge.
Es befindet sich ein Teil der Gliederkette zwischen fixem Endpunkt und dem bewegten Glied, welchen ich im Weiterem “vordere Kette” nennen werde. Dazu kommt einen Teil der Gliederkette zwischen bewegtem Glied und beweglichen Endglied. Diesen nenne ich “hintere Kette”.
Der oben erwähnte Angriffspunkt ist das Ende oder befindet sich am Ende der hinteren Kette. Bewegt sich dieser Punkt, muss sich diese hintere Kette verändern. Dazu muss sich Stellung und Position der Glieder in hinteren Kette verändern. Damit auch die Winkel zwischen den Gliedern der hinteren Kette.
Dies geschieht bei inverser Kinematik.
Bei direkter Kinematik bleibt der Angriffspunkt im Raum stabil. Damit entsteht keine Notwendigkeit, dass die hintere Kette verändert werden müssen.
In der Gitarrenunterrichtswelt heißt das, je nach Kinematik, bleibt Schulter, Ober-, Unterarm, Handteller und Daumen der linken Hand stabil oder wackelt wie ein Kuhschwanz.
Also stellt sich die Frage, wie kann man diese Modellwelt der Bewegungssimulation für den Unterricht oder sich als Gitarrst*In nutzen? Dazu mehr in den nächsten Wochen.
Der Beitrag wurde am Freitag, den 25. März 2022 um 08:20 Uhr veröffentlicht von Stephan Zitzmann und wurde unter den Kategorien: Gitarre lernen, Gitarrentechnik, Gitarrenunterricht, Lernen, Übemethodik abgelegt. | Es gibt keinen Kommentar .