Inverse und direkte Kinematik – Robotik für die linke Hand – Teil 8
Also reagiert die geschlossene Gliederkette der linken Hand auf die Veränderung eines Gelenkwinkels immer gleich?
Grundsätzlich ist es so, wenn wir die Frage rein geometrisch betrachten, dann gibt es mehrere, viele, wenn nicht sogar unendlich viele Stellungsmöglichkeiten für die restlichen Glieder.
Weiter wird mich jetzt manche*r auf Teil 3 verweisen, in dem ich schrieb:
Bei einer Maschine ist das Problem der Änderung des Widerstandes oder Reibung in den Gelenken vermutlich vernachlässigbar. Bei einem Mensch weniger. Meiner Erfahrung nach ist das Problem, umso ungeübter, unerfahrener und ungeschickter der Mensch ist. Denn die Varianz, wie sehr der Mensch seine Muskulatur anspannt, ist höher.
Also eigentlich müssen die Ergebnisse unterschiedlich sein. Da aber das Verfahren bei mir ganz gut schon seit Jahren funktioniert und meinen Schülern hilft, habe ich mich gefragt, gibt es nicht doch eine Art Drang identisch auf eine Winkeländerung zu reagieren.
Dazu treten wir ein paar Schritte zurück und denken uns die linke Hand und Arm als stählerne Gliederkonstruktion.
Würde sich diese Gliederkonstruktion nach ein und derselben Winkeländerung in dieselbe Endstellung begeben?
Meiner Meinung nach ja. Sogar, wenn die Reibung sich in den Gelenken ändert. Dazu muss aber eine Bedingung erfüllt sein, die Schwerkraft muss stärker sein als die Reibkraft in den Gelenken. Denn die Schwerkraft zieht die Gliederkonstuktion zurecht.
Bloß das Bild mit der Schwerkraft hat ein Problem. Wenn man seinen Unterarm auf einen Tisch legt und die Hand mit der Handfläche nach unten über die Tischplatte ragt, müsste der Handteller und die Finger senkrecht zum Boden ausgerichtet sein, wenn nur die Schwerkraft auf die Glieder wirken würde.
Aber Bänder und Muskel verhindern die freie Ausrichtung der Glieder, dass die Schwerkraft ihr Werk vollbringen könnte. Denn Bänder und Muskeln sind im sogenannten “entspannten Zustand” nicht wirklich entspannt, sondern bringen unsere Glieder in Form.
Nehmen wir unser metallene Gliederkonstuktion und bringen auf der Rückseite und Vorderseite eines jeden Gelenkes einen Gummizug an. Die Zugkraft der Gummizüge auf Rückseite und Vorderseite muss unterschiedlich sein. Auf der Vorderseite etwas stärker. So werden die Glieder schließen und unseren Metallfinger gegen das Griffbrett drücken.
Wenn einer der Gummizüge seine Zugkraft verändert, ändert sich die Stellung der ganzen Gliederkonstruktion. Ändert sich bei gleicher Ausgangsposition derselbe Gummizug seine Kraft um denselben Betrag ist die Änderung dieselbe.
Zurück zum menschlichen Körper. In dem stellen die Muskeln die Gummibänder dar. Also wenn ich an einem Gelenke etwas ändere, müssen die anderen Gelenke folgen. Die Frage ist, bleibt die Muskelspannung der anderen Gelenke gleich oder reagiert sie immer mit der gleichen Veränderung.
Ich konnte darauf keine Antwort finden. Aber man ist bestrebt, dass der Finger nicht den Kontakt zum Griffbrett verliert. Aber man ist auch bestrebt, die Fingerkuppe nicht zu sehr auf das Griffbrett zu pressen. Also es gibt ein Bestreben, an der Fingerkuppe eine Art Gleichgewicht zu halten. Es hat bei dieser Aufgabenstellung keinen Sinn die Muskelspannungen beim Wiederholen der Situation stark zu verändern. Das dürfte dazu führen, wenn ich in dieser geschlossenen Gliederkette einen Winkel verändere, dann verändern sich die Winkel gleich.
In Teil 7 habe ich die Frage gestellt, ob der Daumen beim Umpositionieren liegen bleiben soll?
Im Blendermodell wie in Wirklichkeit drückt der Handteller bei diesem freien Spiel der Kräfte gegen den Daumen, der ziemlich unflexibel ist. Wenn ich den Daumen nicht verändere, entstehen Situationen, dass ich die Finger oder andere Gelenke in eine Position zwingen muss, weil manches Gelenk in eine extremere Position gezwungen werden muss.
Es entsteht viel Spannung in der Hand. Diese Spannung kann ich verringern, indem ich den Daumen an der Daumenkuppe auf der Stelle drehe. Dies hat zur Folge, dass ich den ganzen Arm vom Körper abspreizen muss.
Ich will das an einem kleinen Beispiel erläutern. Betrachten wir folgenden Griffwechsel.
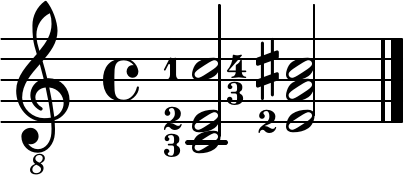
Wenn ich den Daumen bei diesem Griffwechsel in Richtung und Position unverändert lasse, dann muss ich die Finger zusammenquetschen und habe eine hohe Spannung in der Hand. Ich muss darauf achten, dass der vierte Finger nicht wegrutscht.
Spreize ich dann den Arm ab und drehe den Daumen auf der Fingerkuppe, sinkt die Spannung. Aber dazu muss ich den Oberarm mit fast 90 Grad wegstrecken. Die andere Möglichkeit wäre, mein Handgelenk bis zum Anschlag zu beugen.
Wenn ich anstatt dessen den Daumen nach links oben versetze und den Unterarm leicht rotiere, dann ist der A-Dur-Griff am entspanntesten und ich muss mich am wenigsten verrenken.
Der Beitrag wurde am Freitag, den 13. Mai 2022 um 08:33 Uhr veröffentlicht von Stephan Zitzmann und wurde unter den Kategorien: Gitarre lernen, Gitarrentechnik, Übemethodik abgelegt. | Es gibt keinen Kommentar .